Tällä sivulla on kerrottu toimintaluvan hakemisesta SORA-riskiarvion pohjalta.
Operaattorin tulee suorittaa toiminnan SORA-riskiarvio, jos toimintaa ei voida sopeuttaa avoin-luokan toiminnaksi tai toimintaa ei voida suorittaa ennakkoon tehdyn riskiarvion PRDA:n mukaisesti tai standardiskenaarion mukaisesti. EU:n miehittämättömän ilmailun täytäntöönpanoasetuksen 11. artikla käsittelee erityinen-kategorian riskiarviomenettelyä, ja menettely on kuvattu tarkemmin EASA:n julkaisemassa Easy Access-dokumentissa.
SORA-menettelyn perusta on taata operaatiolle sama turvallisuustaso kuin miehitetyssä ilmailussa. SORA-menettely koostuu kymmenestä eri kohdasta. Alla on kuvattu eri kohdat ja toimenpiteet.
1. Toimintakuvaus (CONOPS)
SORA:n ensimmäisessä vaiheessa toimintaluvan hakija kerää ja toimittaa olennaiset tekniset, toiminnalliset ja järjestelmätiedot, joita tarvitaan miehittämättömällä ilma-aluksella suunniteltuun toimintaan liittyvän riskin arvioimiseksi. Toimintakuvaus on kaiken toiminnan perusta, ja sen tulee olla mahdollisimman tarkka ja yksityiskohtainen. Toimintakuvauksen ei tule kuvata vain pelkkää toimintaa, vaan sen tulee antaa myös näkemys UAS-operaattorin turvallisuuskulttuurista. Toimintakuvauksen tulee sisältää myös kuvaus siitä, miten ja milloin toimija on vuorovaikutuksessa ilmaliikennepalvelun tarjoajan kanssa. Toimijan tulee toimintakuvausta tehdessään ottaa huomioon kaikki SORA-menettelyn vaiheet, riskien lievennystoimenpiteet sekä toiminnalliset turvallisuustavoitteet OSO:t. Toimintakuvausta voidaan joutua muuttamaan SORA-menettelyn edetessä, ja menettely tulee aloittaa alusta muutettaessa toimintakuvausta.
Toimintakuvaus voi olla myös osa toimijan toimintakäsikirjaa. Toimintakäsikirjan laatimisen ohjeistus on täällä .
2. Alustavan maariskin määrittely (GRC)
Alustava maariski on suhteutettu UAS:n riskiin osua ulkopuoliseen henkilöön, esimerkiksi menetettäessä UAS:n hallinta. Alustavan maariskin arvioimiseksi tarvitsee tietää käytettävän kaluston äärimitat, kiinteäsiipisellä UAS:lla siipien kärkiväli, helikopterilla roottorin halkaisija ja multikoptereilla rungon mitat sisältäen potkurit. Lisäksi tulee tarkastella aiotun toiminnan operatiivinen skenaario. Hakijan tulee määritellä toiminta-alue, joka sisältää itse toiminnan alueen, sekä turva-alueen. Toiminta-alueen kokoon vaikuttaa UAS:n navigointikyky ja -tarkkuus, suorituskyky annetun reitin seuraamisessa sekä ohjausjärjestelmän viiveet.
Maariskin turva-alueen määrittämisessä tulee käyttää kiinteäsiipisellä kalustolla 1:1 sääntöä lentokorkeuden suhteen, tai pyöriväsiipisillä voidaan käyttää ballistisen putoamisradan tarkastelua viranomaista tyydyttävällä tavalla.
Alla olevassa taulukossa on alustavan maariskin lukuarvot ylilennettävän alueen ja käytettävän kaluston suhteen:
| UAS kokoluokka, äärimitat | 1 metri | 3 metriä | 8 metriä | yli 8 metriä |
| Tyypillinen kineettinen energia | < 700 J | < 34 kJ | < 1084 kJ | > 1084 kJ |
| Operatiivinen skenaario | ||||
| VLOS / BVLOS valvotun maa-alueen yläpuolella | 1 | 2 | 3 | 4 |
| VLOS harvaan asutulla alueella | 2 | 3 | 4 | 5 |
| BVLOS harvaan asutulla alueella | 3 | 4 | 5 | 6 |
| VLOS tiheästi asutulla alueella | 4 | 5 | 6 | 8 |
| BVLOS tiheästi asutulla alueella | 5 | 6 | 8 | 10 |
| VLOS väkijoukon yläpuolella | 7 | |||
| BVLOS väkijoukon yläpuolella | 8 |
Operatiiviset skenaariot kuvaavat erilaisten operaatioiden luokittelua, missä riskit ulkopuolisia kohtaan kasvavat toiminnan mukaan.
Avustettu näköyhteys EVLOS katsotaan BVLOS-operaatioiksi alustavan maariskin määrittelyssä. Valvottu maa-alue on alue, missä toimija voi valvoa että ulkopuolisia henkilöitä ei ole kyseisellä alueella.
Alustavaa maariskiä tiheästi asutulla alueella ei voida laskea alemmaksi, jos toiminta tapahtuu rajatuilla alueilla, missä ulkopuolisia ei liiku, esimerkiksi ratapihat ja vesialueet tiheästiasutuilla alueilla. Näissä tapauksissa riskivähennykset suoritetaan SORA-menettelyn 3. vaiheessa.
Alustavan maariskin taulukossa on annettu riskiluku niille operaatiotyypeille mitkä ovat mahdollisia erityinen-kategoriassa. Operaatiot joissa ei ole alustavan maariskin lukua, eivät ole mahdollisia erityinen-kategoriassa.
Alustavan maariskin määrittelyssä käytettävä kineettinen energia lasketaan kiinteäsiipistä UAS käytettäessä UAS:n matkalentonopeuden mukaan, ja pyöriväriipisen UAS:n kohdalla lentotehtävällä käytetyn lentokorkeuden mukaisen putoamisen terminaalinopeudella.
3. Lopullisen maariskin määrittely
Alustavaa maariskiä UAS:n osumisesta ulkopuoliseen henkilöön voidaan vähentää erilaisilla riskien lievennystoimenpiteillä. Riskien lievennystoimenpiteillä on suora vaikutus kyseisen toiminnan operatiivisiin turvallisuustavoitteisiin, joten riskien lievennystoiminpiteiden vaikutuksien määrittely on erittäin tärkeää. Lopullisen maariskin määritellään kolmen eri riskien lievennystoimenpiteen jälkeen. Alla olevassa taulukossa on riskien lievennystoimienpiteet ja niiden vaikutus alustavaan maariskiin:
| Toimintavarmuus (Robustness) | ||||
| Lievennystoimenpiteen numero | Maariskin lievennystoimenpide | Matala / ei vaikutusta | Keskitaso | Korkea |
| 1 | M1 - Maariskin strateginen lievennys | 0: Ei vaikutusta, -1: Matala | -2 | -4 |
| 2 | M2 - Maahan törmäämisen vaikutuksien lievennys | 0 | -1 | -2 |
| 3 | M3 - Hätätilannesuunnitelma (ERP) on käytössä, UAS operaattori on validoitu ja suunnitelma on tehokas | 1 | 0 | N/A |
Maariskien M1 lievennystoimenpiteillä maariskiä ei voi lieventää pienemmäksi kujin alustavan maariskin taulukossa oleva alin riskiluku. Tämä johtuu siitä, että ei ole mahdollista lieventää riskin kohteena olevien henkilöiden määrää vähäisemmäksi kuin valvotulla alueella toimittaessa.
Lopullisen maariskin suurin mahdollinen arvo erityinen-kategoriassa on 7, korkeamman maariskin operaatiot ovat mahdollisia sertifioitu-luokassa.
Maariskiä voi lieventää myös vähentämällä riskin alla olevien henkilöiden määrää. Riskin lieventäminen on mahdollista yhdellä pisteellä, kun riskin kohteena olevien henkilöiden määrää voidaan vähentää kymmenesosaan lähtötilanteesta. Tästä menettelystä on kerrottu tarkemmin Easy Access AMC1 artikla 11. liitteessä B (Ulkoinen linkki).
M3 lievennys korkealla toimintavarmuudella ei ole sovellettavissa maariskin lievennyksenä (lisätty 13.9.2024)
Ilmariskin määrittely yleisesti
SORA menetelmä käyttää toimintakuvauksessa (ConOps) määriteltyä operaation käyttämää ilmatilaa lähtötilanteena törmäysriskin arvioimiseksi määrittelemällä ilmariskiluokituksen ARC. Ilmariskiluokitusta voidaan lieventää käyttämällä strategisia ja taktisia riskin lievennystoiminepiteitä. Strategisia riskin lievennystoiminepiteitä käyttämällä ilmariskiluokitusta voi olla mahdollista laskea. Esimerkikkinä strategisista ilmariskin lievennystoiminepiteenä voi olla toimiminen tiettynä ajanjaksona tai tiettyjen maantieteellisten rajojen sisällä. Strategisten lievennystoimenpiteiden soveltamisen jälkeen mahdollisen jäännösriskin lieventämiseen voidaan käyttää taktisia lievennystoimenpiteitä.
Taktiset vähennystoimenpiteet ovat havaitsemis- ja väistöjärjestelmiä (DAA) tai vaihtoehtoisia liikenteen havainnointikeinoja,, kuten ADS-B, FLARM, U-space -palvelut tai operatiiviset menetelmät. Strategisten väennystoimenpiteiden jälkeisestä jäännösilmariskin tasosta riippuen vaadittavat taktiset lievennyssuorituskykyvaatimukset (TMPR) voivat vaihdella.
Osana SORA-prosessia UAS-operaattorin tulee tehdä yhteistyötä asianomaisen ilmatilan palveluntarjoajan kanssa ja hankkia tarvittavat luvat (esimerkiksi ilmaliikennepalvelun tarjoaja ANSP tai U-space palveluntarjoaja). Lisäksi voidaan käyttää yleisiä paikallisia valtuuksia tai paikallisia menetelmiä, jotka mahdollistavat pääsyn tiettyyn osaan valvottua ilmatilaa, jos sellaiset menettelyt ovat saatavilla.
Riskiarvioinnin tuloksista riippumatta UAS-operaattorin tulee kiinnittää erityistä huomiota kaikkiin ominaisuuksiin, jotka voivat parantaa UAS:n havaittavuutta ilmassa. Tämän vuoksi suositellaan käyttämään teknisiä ratkaisuja, jotka parantavt UAS:n elektronista näkyvyyttä tai havaittavuutta.
4. Alustavan ilmariskin määrittely
Toimivaltainen viranomainen, Suomessa Traficom, ANSP tai U-space-palveluntarjoaja voi halutessaan kartoittaa ilmatilan törmäysriskit suoraan käyttämällä ilmatilan liikennemäärän ja tiheyden havainnointitutkimuksia. Nämä kartat näyttäisivät suoraan alkuperäisen ARC:n tietylle ilmatilan osalle. Jos edellämainitut tahot tarjoavat törmäysriskikartan (staattinen tai dynaaminen), toimintaluvan hakijan tulee käyttää tätä palvelua ARC:n määrittämiseen, ja voi jatkaa ilmariskin määrittelyä strategisilla vähennystoimenpiteillä.
Alustavan ilmariskin määrittämisessä voi käyttää apuna alla olevaa kaaviota:
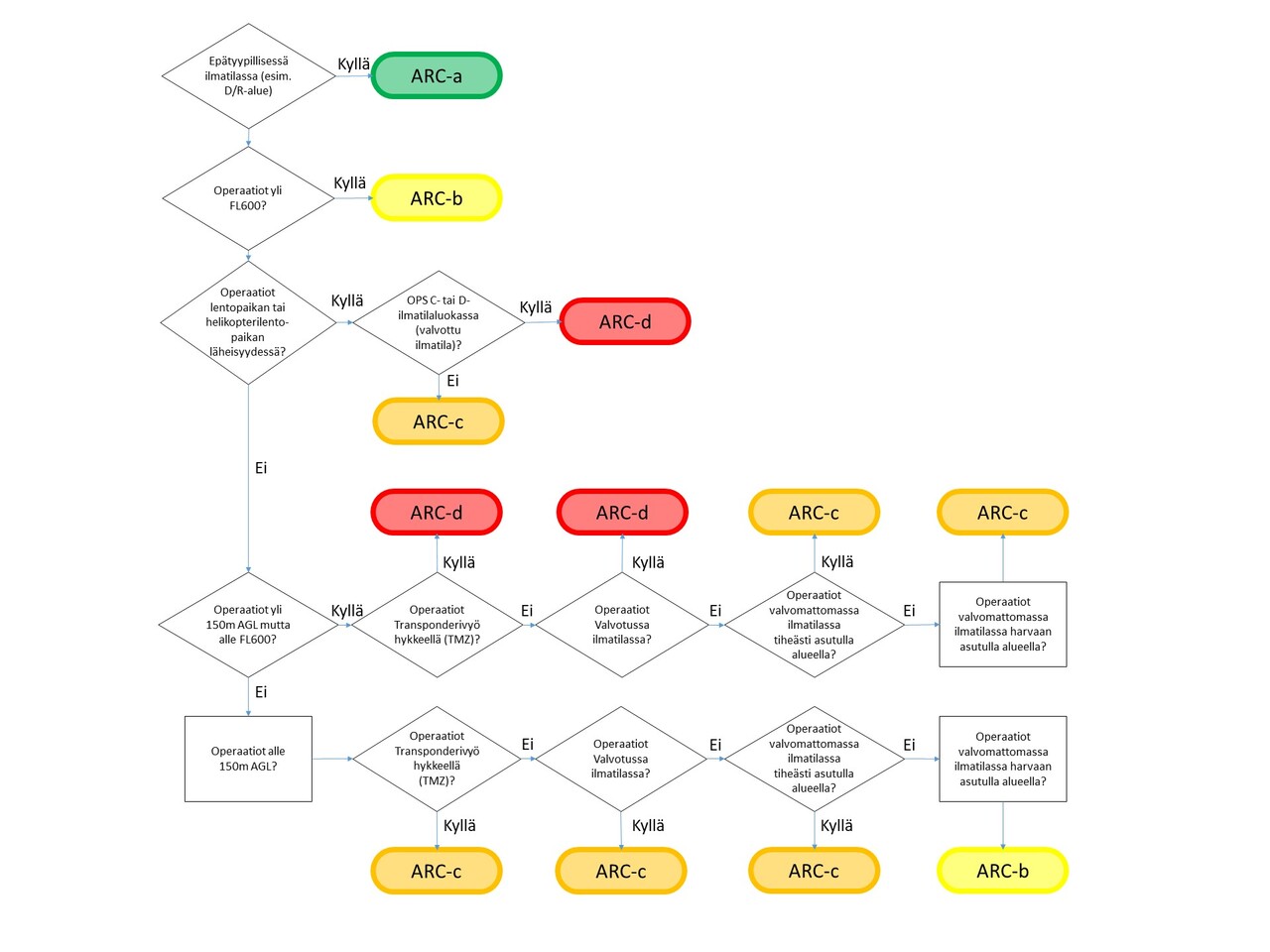
Alustava ARC on laadullinen luokitteluarvo siitä, millä todennäköisyydella UAS kohtaa miehitetyn ilma-aluksen tyypillisessä yleisessä siviili-ilmatilassa. ARC on ilmatilan yhteentörmäysriskin alustava arvo ennen riskin lievennyksiä. Tietyn paikallisen ilmatilan osan todellinen törmäsyriski voi olla huomattavasti poikkeava, ja tätä voidaan käsitellä käyttämällä strategisia lievennystoimenpiteitä ARC:n vähentämiseksi. Strategisten lievennystoimenpiteiden käyttäminen ei ole pakollista SORA-prosessissa.
Vaikka ARC:n arvo on konservatiivinen, ilmatilassa voi olla alueita ja/tai aikoja, jolloin konservatiivinenkaan ARC ei ole riittävä. Sekä toimivaltaisen viranomaisen että UAS-operaattorin tulee ymmärtää toiminta-alue, ja se missä alustavan ilmariskin määritelmät eivät vastaa todellista tilannetta. Joissakin tilanteissa toimivaltainen viranomainen voi korottaa ARC:n alustavan ilmariskin taulukossa määriteltyä korkammalle tasolle. ANSP:aa tulee kuulla sen varmistamiseksi, että operatiiviseen liikenteen määrään liittyvät oletukset ovat tarkkoja.
- ARC-a on määritelty ilmatilaksi, missä UAV:n ja miehitetyn ilma-aluksen törmäysvaara on hyväksyttävällä tasolla ilman taktisia lievennyksiä
- ARC-b, ARC-c ja ARC-d on määritelty ilmatilaksi, missä on kohonnut riski UAV:n ja miehitetyn ilma-aluksen törmäämiselle
UAV:n operaatio saattaa ulottua useisiin erilaisiin ilmatilan osiin. Toimintaluvan hakijan tulee suorittaa ilmariskin tarkastelu koko operaation toiminta-alueelle.
5. Strategiset ilmariskin lievennystoimenpiteet (valinnainen)
Kuten aiemmin todettiin, ARC on yleinen laadullinen luokitus siitä todennäköisyydestä millä UAS kohtaa miehitetyn ilma-aluksen tietyssä ilmatilassa. On kuitenkin mahdollista, että UAS:n toiminta-alueella voi olla erilainen törmäysriski kuin yleisen ARC:n määrittelemä. Jos toimintaluvan hakija katsoo, että yleinen ARC on liian korkea toiminta-alueen ilmatilaan, hakijan tulee esittää strategiset ilariskin vähennystoimenpiteet Easy Access AMC artikla 11. liitteen C (Ulkoinen linkki) mukaisesti. Jos toimintaluvan hakijan mielestä ARC on hyväksyttävä toiminta-alueelle, alustavasta ARC:stä muodostuu jäännösilmariskin arvo.
6. Taktiset ilmariskin lievennystoimenpiteet ja toimenpiteiden suorituskyky
Taktisia ilmariskin lievennystoimenpiteitä käytetään lieventämään kyseisen ilmatilan törmäyksen jäännösriskiä, jota tarvitaan sovellettavan ilmatilan turvallisuustavoitteen saavuttamiseksi. Taktiset lievennykset ovat joko "havaitse ja väistä" -muotoa (see and avoid, detect and avoid, DAA), esimerkiksi VLOS-toimintaa, tai ne voivat edellyttää järjestelmää, joka tarjoaa vaihtoehtoisen tavan saavuttaa kyseisessä ilmatilassa riittävä turvallisuustavoite. EASA Easy Access artikla 11 liite D (Ulkoinen linkki) sisältää menetelmiä taktisten lievennysten soveltamiseksi.
Operaatiot VLOS/EVLOS
VLOS katsotaan olevan hyväksyttävä taktinen törmäysriskin lievennysmenetelmä kaikilla ARC-tasoilla. Tästä huolimatta UAS-operaattoreita kannustetaan harkitsemaan lisäkeinojen käyttämistä tilannetietoisuuden lisäämiseksi toiminta-alueen läheisyydessä toimivan miehitetyn lentoliikenteen osalta.
Miehittämättömien ilma-alusten VLOS-lennoilla ei tarvitse täyttää taktisia lievennystoimenpiteiden suorituskykyvaatimuksia (TMPR). Lennon eri osien kohdalla VLOS-segmenttien ei tarvitse täyttää TMPR-vaatimuksia, mutta BVLOS-segmenttien on täytettävä TMPR-vaatimukset.
Yleisesti VLOS-vaatimuksia sovelletaan myös EVLOS-operaatioihin. EVLOS-operaatiossa tulee huomioitavaksi lisävaatimuksia VLOS-vaatimusten lisäksi. EVLOS-operaatioissa yhteydenpidon viive kauko-ohjaajan ja avustavan ilmatilan tarkkailijan välillä ei saa ylittää 15 sekuntia.
VLOS-operaatioden osalta hakijan tulee dokumentoida VLOS-väistötoimenpiteet, joissa on esitetty mitä menetelmiä liikenteen havaitsemiseen käytetään, ja määritellä niihin liittyvät kriteerit joita sovelletaan havaitun liikenteen väistämistä koskeviin päätöksiin. Jos kauko-ohjaaja käyttää apuna tähystäjää, tulee myös kauko-ohjaajan ja tähystäjän välillä käytettävä fraseologia kuvata.
VLOS-operaatioiden suhteen oletetaan, että tähystäjän suurin etäisyys havaita miehitetty ilmaliikenne on noin kolme kilometriä. Tämä ei ole tarkka arvo, vaan etäisyys riippuu sääolosuhteista, ilma-aluksen koosta, lähestymisnopeudesta jne. Tämän takia operaattorin tulee sopeuttaa toimintaansa olosuhteiden mukaisesti.
Operaatiot käyttäen DAA-järjestelmää - TMPR
Muissa kuin VLOS-operaatioissa alla olevassa taulukossa on ilmariskin jäännöstason mukaiset TMPR-vaatimustasot
| Ilmariskin jäännöstaso | TMPR | TMPR tehokkuus |
| ARC-d | Korkea | Korkea |
| ARC-c | Keskitaso | Keskitaso |
| ARC-b | Matala | Matala |
| ARC-a | Ei vaatimusta | Ei vaatimusta |
Korkea TMPR (ARC-d): Ilmatila, missä joko miehitettyjen ilma-alusten kohtaamistodennäköisyys on korkea ja/tai käytettävissä olevat strategiset lievennystoimenpiteet ovat vähäiset. Tämän johdosta jäännösriski on korkea ja myös TMPR-vaatimukset ovat korkealla tasolla. Tässä ilmatilassa UAV voi toimia intergroidussa ilmatilassa, ja sen on noudatettava kyseiseen ilmatilaan sovellettavia menettelyjä ilman että se heikentäisi ilmatilan käytettävyyttä miehitetylle ilmailulle. ARC-d-ilmariskialueella käytännössä vaaditaan noudattamaan tunnustettuja DAA-järjestelmästandardeja, esimerkiksi RTCA SC-228.
Keskitaso TMPR (ARC-c): Keskitasoinen TMPR vaaditaan toimittaessa ilmatilassa, missä todennäköisyys kohdata miehitettyjä ilma-aluksia on kohtuullinen ja/tai käytettävissä olevat strategiset lievennystoimenpiteet ovat keskitasoa. Keskitason TMPR-toimintoja tukevat nykyisin ilmailussa käytössä olevat järjestelmät, jotka auttavat kauko-ohjaajaa havaitsemaan miehitettyjä ilma-aluksia. Liikenteen välttämistoiminnot ovat edistyneempiä kuin matala-asteisella TMPR:llä. Keskitason TMPR liikenteen havaintokykyvaatimus on havaita 90% liikenteestä havaintoalueella.
Matala TMPR (ARC-b): Matala TMPR vaaditaan toimittaessa ilmatilassa, missä todennäköisyys kohdata miehitetty ilma-alus on pieni, mutta ei merkityksetön, ja/tai jossa strategisilla lievennyksillä saadaan jäännösriski matalalle tasolle. Matalan tason TMPR voidaan saavuttaa käyttämällä tekniikkaa ja järjestelmiä jotka on tarkoitettu avustamaan kauko-ohjaajaa muun liikenteen havaitsemisessa, ja järjestelmät voidaan tehdä alhaisempien kriteerien mukaan. Esimerkiksi alle 120 metrin lentokorkeuksilla liikenteen väistötoimet perustuvat enimmäkseen nopeaan korkeuden vähentämiseen korkeudelle, missä miehitetyn ilmailun ei odoteta koskaan lentävän. Matalan TMPR liikenteen havaitsemiskykyvaatimus on havaita 50% liikenteestä havaintoalueella. Soveltuvia järjestelmiä ovat esimerkiksi:
- Verkkopohjaiset reaaliaikaiset ilmaliikenteen seurantapalvelut
- Matalan kustannustason ADSB/FLARM -vastaanottimet
- Kyseisen ilmatilan radioliikenteen seuranta
Ei TMPR-vaatimusta (ARC-a): Ilmatila, missä todennäköisyys kohdata miehitetty ilma-alus odotetaan olevan erittäin alhainen, joten TMPR-vaatimusta ei ole. Tällainen ilmatila määritellään ilmatilaksi, missä UAV:n ja miehitetyn ilma-aluksen törmäysriski on hyväksyttävä ilman taktisia lievennyksiä. Hakijan tulee osoittaa toiminta-alueen liikenteen olevan niin vähäistä, että taktisia lievennyksiä ei tarvita. Myös operaatiot erillisessä varatussa ilmatilassa katsotaan olevan ARC-a.
EASA:n Easy Access artikla 11 liitteessä D (Ulkoinen linkki) kerrotaan TMPR-vaatimuksista tarkemmin.
Ilmatilan ja/tai toiminnallisten lisävaatimusten huomioon ottaminen
Toimivaltainen viranomainen tai ANSP voi vaatia muutoksia alkupeäiseen tai myöhempään hyväksyntään turvallisuus- tai toimintaongelmien ilmetessä. UAS-operaattorin ja viranomaisen on tiedostettava, että ARC:t ovat törmäsyriskin yleinen laadullinen luokitus. Paikalliset olosuhteet voivat vaikuttaa, jopa mitätöidä SORA:n ilmariskiarvion, esimerkiksi erityisten tapahtumien vuoksi.
Toiminta valvotussa ilmatilassa, lentokentän/helikopterikentän läheisyydessä tai transponderivyöhykkeellä/Mode C -vyöhykkeellä (TMZ) vaatii ennakkoon yhteydenpitoa ja toimintamenetelmistä sopimista ANSP:n kanssa.
7. Lopullisen jäännösriskin tason määrittely ja toimintavarmuuden ja luotettavuuden määrittely (Specific assurance and integrity level SAIL)
SAIL-luku yhdistää maa- ja ilmariskianalyysit, ja antaa vaaditut toiminnalliset turvallisuustavoitteet OSO:t ja niiden toimintavarmuustasot. SAIL edustaa luottamustasoa siitä, että UAS-toiminta pysyy hallinnassa. Lopullisen maariskin GRC ja jäännösilmariskin ARC on määrittelyn jälkeen saadaan toimintakuvauksen mukaisen toiminnan SAIL-arvo.
SAIL ei ole määrällinen arvo, vaan ilmoittaa
- Noudatettavat OSO:t
- Kuvaus toimista, jotka tukevat OSO:n saavuttamista
- Todisteet siitä, että OSO:t on saavutettu
SAIL määritellään oheisen taulukon mukaan:
| Jäännös ARC | ||||
| Lopullinen GRC | a | b | c | d |
| =<2 | I | II | IV | VI |
| 3 | II | II | IV | VI |
| 4 | III | III | IV | VI |
| 5 | IV | IV | IV | VI |
| 6 | V | V | V | VI |
| 7 | VI | VI | VI | VI |
| >7 | Sertifioitu-kategorian operaatio |
8. Toiminnallisten turvallisuustavoitteiden määrittely (OSO)
SORA-prosessin viimeinen vaihe on SAIL:n avulla tarkastella toiminnan suojauksia OSO:n muodossa ja määrittää niiden toimintavarmuus. Alla olevasta taulukosta selviää SAIL mukaiset OSO-toimintavarmuustasot. Taulokussa O on valinnainen, L matalatasoinen, M keskitasoinen ja H korkeatasoinen toimintavarmuus. Eri OSO:t on ryhmitelty sen uhkan perusteella, mitä ne lieventävät; tämän takia jotkin OSO:t toistuvat taulukossa.
OSO numero (Liite E) | SAIL | ||||||
| Technical issue with the UAS | I | II | III | IV | V | VI | |
| OSO#1 | Ensure the UAS operator is competent and/or proven | O | L | M | H | H | H |
| OSO#2 | UAS manufactured by competent and/or proven entity | O | O | L | M | H | H |
| OSO#3 | UAS maintained by competent and/or proven entity | L | L | M | M | H | H |
| OSO#4 | UAS developed to authority recognised design standards | O | O | L | L | M | H |
| OSO#5 | UAS is designed considering system safety and reliability | O | O | L | M | H | H |
| OSO#6 | C3 link performance is appropriate for the operation | O | L | L | M | H | H |
| OSO#7 | Inspection of the UAS (product inspection) to ensure consistency with the ConOps | L | L | M | M | H | H |
| OSO#8 | Operational procedures are defined, validated and adhered to | L | M | H | H | H | H |
| OSO#9 | Remote crew trained and current and able to control the abnormal situation | L | L | M | M | H | H |
| OSO#10 | Safe recovery from a technical issue | L | L | M | M | H | H |
Deterioration of external systems supporting UAS operations | |||||||
| OSO#11 | Procedures are in-place to handle the deterioration of external systems supporting UAS operations | L | M | H | H | H | H |
| OSO#12 | The UAS is designed to manage the deterioration of external systems supporting UAS operations | L | L | M | M | H | H |
| OSO#13 | External services supporting UAS operations are adequate for the operation | L | L | M | H | H | H |
| Human error | |||||||
| OSO#14 | Operational procedures are defined, validated and adhered to | L | M | H | H | H | H |
| OSO#15 | Remote crew trained and current and able to control the abnormal situation | L | L | M | M | H | H |
| OSO#16 | Multi-crew coordination | L | L | M | M | H | H |
| OSO#17 | Remote crew is fit to operate | L | L | M | M | H | H |
| OSO#18 | Automatic protection of the flight envelope from human error | O | O | L | M | H | H |
| OSO#19 | Safe recovery from human error | O | O | L | M | M | H |
| OSO#20 | A human factors evaluation has been performed and the human machine interface (HMI) found appropriate for the mission | O | L | L | M | M | H |
| Adverse operating conditions | |||||||
| OSO#21 | Operational procedures are defined, validated and adhered to | L | M | H | H | H | H |
| OSO#22 | The remote crew is trained to identify critical environmental conditions and to avoid them | L | L | M | M | M | H |
| OSO#23 | Environmental conditions for safe operations are defined, measurable and adhered to | L | L | M | M | H | H |
| OSO#24 | UAS is designed and qualified for adverse environmental conditions | O | O | M | H | H | H |
9. Toiminta-alueen viereisen alueen ja ilmatilan huomioiminen
Tässä kohdassa on tarkoitus hallita riskiä, joka aiheutuu hallinnan menettämisestä, mikä johtaa UAV:n päätymiseen viereiselle alueelle tai ilmatilaan. Nämä alueet voivat vaihdella lennon eri vaiheiden mukaan.
Suojauksen turvallisuusvaatimukset ovat:
Mikään todennäköinen UAS:n vika tai toimintaan liittyvän järjestelmän vika ei saa johtaa UAS:n toimintaan toiminta-alueen ulkopuolella.
- Vaatimustenmukaisuus on osoitettava suunnittelu- ja valmistusarviolla, ja sen on sisällettävä vähintään
- Suunnittelu- ja valmistusominaisuudet (riippumattomuus, erottelu ja redundanssi, independence, separation redundancy)
- Kaikki toimintakuvaukseen liittyvät erityiset riskitekijät (esim. rakeet, jää, lumi, sähkömagneettiset häiriöt jne.)
Tehostetut järjestelmävaatimukset toiminta-alueella pysymiseksi koostuvat seuraavista turvallisuusvaatimuksista, ja koskee suoritettavaa operaatiota alla mainituissa olosuhteissa:
- Toiminnan viereiseisellä alueella on väkijoukko, ellei UAS ole hyväksytty lentämään väkijoukon yläpuolella, tai
- Toiminnan viereisen ilmatilan ilmariski on ARC-d tasolla, ellei operaation jäännösilmariski jo ole ARC-d, tai
- Toiminta-alue on tiheästi asutulla alueella, missä maariskin lieventämistoimenpiteenä on sovellettu M1-lievennystä, tai
- Toiminta tapahtuu valvotulla maa-alueella
UAS on suunniteltu toimivaltaisen viranomaisen riittäviksi katsomien standardien mukaisesti ja/tai kyseisen viranomaisen hyväksymien vaatimustenmukaisuuden mukaisesti siten, että:
- Todennäköisyys sille, että UAS poistuu toiminta-alueelta tulee olla pienempi kuin 10^-4/lentotunti; ja
- Mikään yksittäinen UAS:n vika ei saa johtaa sen toimintaan maariskin turva-alueen ulkopuolella
- Näiden vaatimusten noudattaminen tulee osoittaa analyysi- ja/tai testitiedolla ja sitä tukevalla todisteella.
Ohjelmisto ja ilma-aluksessa olevat elektroniset laitteet, joiden suunnitteluvirheet voivat suoraan johtaa maariskin suoja-alueen ulkopuolisiin toimintoihin, on kehitettävä ilmailun standardien tain menetelmien mukaisesti toimivaltaisen viranomaisen tunnustamalla tavalla.
Koska kaikkia tilanteita ei ole mahdollista ennakoida, UAS-operaattori, toimivaltainen viranomainen ja ANSP voivat käyttää harkintaa toiminta-alueen viereisen ilmatilan ja maa-alueen määrittelyssä.
10. Kattava turvallisuusarvio
SORA-prosessi tarjoaa toimintaluvan hakijalle, toimivaltaiselle viranomaiselle ja lennonvarmistuspalvelun tarjoajalle menetelmän, joka sisältää sarjan lievennyksiä ja turvallisuustavoitteita, jotka on otettava huomioon, jotta voidaan varmistaa riittävä luottamus suoritettavan toiminnan turvallisuuteen. Nämä ovat:
- Alustavan maariskin GRC:n lievennykset
- Alustavan ilmariskin ARC:n strategiset lievennykset
- Taktiset lievennykset jäännösilmariskille ARC
- Toiminnan viereisten ilma- ja maa-alueiden huomioiminen
- Toiminnalliset turvallisuustavoitteet OSO
SORA-prosessin edellyttämien riskien lievennysten ja tavoitteiden tyydyttävä perustelu antaa riittävän varmuuden siitä, että aiottu operaatio voidaan suorittaa turvallisesti.
UAS-operaattorin tulee huomioida kaikki lisävaatimukset, jotka eivät kuulu SORA-prosessiin (esimerkiksi turva-asiat security, yksityisyys, ympäristön suojelu jne.) ja tunnistaa asiaankuuluvat sidosryhmät, kuten ympäristönsuojeluviranomainen, kansalliset turvallisuuselimet jne. SORA-prosessissa suoritettavat toimet vastaavat todennäköisesti näihin lisätarpeisiin, mutta niitä ei välttämättä pidetä aina riittävinä.
UAS-operaattorin tulee varmistaa SORA-riskiarvion ja todellisten toimintaolosuhteiden (operaation aikaisen) välinen johdonmukaisuus, ja tarvittaessa keskeyttää operaatio.