På den här sidan finns information om hur man kan ansöka om ett operativt tillstånd utgående från en SORA-riskanalys.
Operatören ska genomföra en SORA-riskanalys om verksamheten inte kan justeras till att omfattas av den öppna kategorin, om verksamheten inte kan utföras utgående från en fördefinierad riskanalys PDRA eller från ett standardscenario. Artikel 11 i EU:s genomförandeförordning om regler och förfaranden för drift av obemannade luftfartyg handlar om regler för bedömningar av operativ risk i den specifika kategorin, och metoderna har beskrivits närmare i EASA:s Easy Access-dokument.
SORA-metoden har som mål att garantera operationen samma säkerhetsnivå som i bemannad luftfart. SORA-metoden består av tio olika punkter. Nedan beskrivs punkterna och åtgärderna.
1. Verksamhetsbeskrivning (CONOPS)
I det första skedet av SORA ska personen som ansöker om operativt tillstånd samla in och skicka in väsentlig data om teknik, funktioner och system som behövs för att bedöma risken för den planerade verksamheten med ett obemannat luftfartyg. Verksamhetsbeskrivningen ligger som grund för all verksamhet och ska vara så noggrann och specifik som möjligt. Verksamhetsbeskrivningen ska inte enbart beskriva verksamheten, utan ska också ge en insikt i UAS-operatörens säkerhetskultur. Verksamhetsbeskrivningen ska också innehålla en beskrivning av hur och när operatorn har växelverkat med leverantören av flygtrafikledningstjänster. Opeartorn ska när verksamhetsbeskrivningen utarbetas beakta alla skeden i SORA-förfarandet, riskminimeringsåtgärderna samt de operativa säkerhetskraven OSO. Verksamhetsbeskrivningen kan eventuellt tvingas ändras i och med att SORA-förfarandet framskrider, och förfarandet ska startas från början om verksamhetsbeskrivningen ändras.
Verksamhetsbeskrivningen kan också vara en del av opeartorns drifthandbok. Anvisningar för att göra upp en drifthandbok finns här.
2. Fastställandet av den preliminära markrisken (GRC)
Den preliminära markrisken är relaterad till risken att UAS träffar en utomstående person, till exempel om kontrollen över UAS förloras. För att bedöma den preliminära markrisken måste man vara medveten om dimensionerna av utrustningen som används, för drönare med fasta vingar är detta vingspannen, för helikoptrar är det rotorns diameter och för multikoptrar är det ramens dimensioner inklusive propellrar. Dessutom ska man kontrollera det operativa scenariot för den avsedda verksamheten. Ansökaren ska fastställa ett verksamhetsområde som innehåller området för själva verksamheten samt ett buffertområde. Verksamhetsområdets storlek påverkas av UAS-enhetens navigeringsförmåga och -noggrannhet, förmåga att följa den givna rutten, samt fördröjningar i styrsystemet.
När man fastställer markriskbufferten ska man för drönare med fasta vingar använda 1:1-regeln för flyghöjd, och för rotodrivna drönare kan man granska den ballistiska fallbanan på ett sätt som är godtagbart för myndigheten.
I tabellen nedan finns talen för den preliminära markrisken i relation till området som man flyger över och utrustningen som används:
| UAS-storleksklass, dimensioner | 1 meter | 3 meter | 8 meter | över 8 meter |
| Typisk kinetisk energi | < 700 J | < 34 kJ | < 1084 kJ | > 1084 kJ |
| Operativt scenario | ||||
| VLOS / BVLOS över kontrollerat markområde | 1 | 2 | 3 | 4 |
| VLOS i glesbebyggt område | 2 | 3 | 4 | 5 |
| BVLOS i glesbebyggt område | 3 | 4 | 5 | 6 |
| VLOS i tätbefolkat område | 4 | 5 | 6 | 8 |
| BVLOS i tätbefolkat område | 5 | 6 | 8 | 10 |
| VLOS över folkmassa | 7 | |||
| BVLOS över folkmassa | 8 |
De operativa scenarierna beskriver klassificeringen av olika operationer, där riskerna för utomstående ökar enligt verksamheten.
Utvidgad synlinje EVLOS räknas som en BVLOS-operation när man fastställer den preliminära markrisken. Ett kontrollerat markområde är ett område där aktören kan kontrollera att inga utomstående personer vistas i området i fråga.
Den preliminära markrisken för tätbefolkade områden kan inte räknas som lägre om verksamheten sker inom ett begränsat område där utomstående inte rör sig, till exempel en bangård eller över vattenområden i tätbefolkade områden. I dessa fall sker riskminimeringen i SORA-förfarandets 3:e skede.
I tabellen för den preliminära markrisken ges ett risktal för de typer av operationer som är möjliga inom den specifika kategorin. Operationer som inte har ett tal för den preliminära markrisken kan inte utföras inom den specifika kategorin.
Den kinetiska energin som används för att fastställa den preliminära markrisken räknas för UAS med fasta vingar enligt drönarens marschfart, och för rotordrivna UAS enligt terminalhastigheten vid fall från den flyghöjd som används under flygningen.
3. Slutgiltigt fastställande av markrisken
Man kan minimera den preliminära markrisken för att en utomstående person träffas av UAS genom olika riskminimeringsåtgärder. Riskminimeringsåtgärderna har en direkt inverkan på den ifrågavarande verksamhetens operativa säkerhetsmål, varför det är ytterst viktigt att fastställa effekterna av riskminimeringsåtgärderna. Den slutgiltiga markrisken fastställs efter tre skilda riskminimeringsåtgärder. I tabellen nedan finns riskminimeringsåtgärderna och deras inverkan på den preliminära markrisken:
| Robusthet (Robustness) | ||||
| Riskminimeringsåtgärdens nummer | Riskminimeringsåtgärd för markrisk | Låg / ingen effekt | Medelhög | Hög |
| 1 | M1 - Strategisk minimering av markrisk | 0: Ingen effekt, -1: Låg | -2 | -4 |
| 2 | M2 - Minimering av effekten av kollision med mark | 0 | -1 | -2 |
| 3 | M3 - Nödplan (ERP) är i bruk, UAS-operatören är validerad och planen är effektiv | 1 | 0 | N/A |
Det går inte att minimera markrisken under det minsta risktalet i tabellen för den preliminära markrisken med M1 riskminimeringsåtgärderna. Detta beror på att det inte är möjligt att minimera antalet personer som är utsatta för risk till mindre än när driften sker inom ett kontrollerat område.
Den slutgiltiga markriskens största möjliga värde i den specifika kategorin är 7. Operationer med högre markrisk är möjliga inom den certifierade kategorin.
Man kan också minimera markrisken genom att minska på antalet personer som är utsatta för risk. Man kan minimera risken med ett poäng om man kan minska på antalet personer som är utsatta för risk till en tiondel av startsituationen. Närmare information om detta finns i Easy Access AMC1 artikel 11 bilaga B (Extern länk).
M3-minimeringsåtgärden med hög robusthet är inte tillämplig som en markriskmitigering (tillägg 13.9.2024).
Allmänt om fastställandet av luftrisk
SORA-metoden använder det luftrum för operationen som fastställs i verksamhetsbeskrivningen (ConOps) som utgångspunkt för att bedöma risken för kollision genom att fastställa en klassificering av luftrisken ARC. Klassificeringen av luftrisken kan minskas genom att använda strategiska och taktiska riskminimeringsåtgärder. Genom att använda strategiska riskminimeringsåtgärder är det möjligt att minska på den klassificerade luftrisken. Ett exempel på en strategisk riskminimeringsåtgärd är att utföra driften under en viss tidpunkt eller inom vissa geografiska gränser. Efter att ha tillämpat de strategiska riskminimeringsåtgärderna är det möjligt att minimera eventuella resterande risker genom taktiska riskminimeringsåtgärder.
Till de taktiska riskminimeringsåtgärderna hör system för detektion och undvikande eller alternativt andra sätt att observera trafik, såsom tjänsterna ADS-B, FLARM, U-space eller operativa metoder. Beroende på nivån av den resterande risken efter de strategiska riskminimeringsåtgärderna kan prestandakraven för de taktiska riskminimeringsåtgärderna (TMPR) variera.
Som en del av SORA-processen ska UAS-operatören samarbeta med den relevanta leverantören av flygtrafikledningstjänster och skaffa alla nödvändiga tillstånd (till exempel leverantör av flygtrafikledningstjänster ANSP eller U-space-serviceleverantören). Dessutom kan man använda allmänna lokala auktoriseringar eller metoder som tillåter inträde i en viss del av ett kontrollerat luftrum, om sådana förfaranden är tillgängliga.
Oberoende av resultaten från riskanalysen ska UAS-operatören fästa särskild uppmärksamhet vid alla egenskaper som kan minska på UAS sårbarhet i luften. Därför rekommenderas det att man använder tekniska lösningar som förbättrar den elektroniska synligheten eller förmågan att observera UAS.
4. Fastställandet av den preliminära luftrisken
Den behöriga myndigheten, i Finland Traficom, ANSP eller U-space-serviceleverantören kan om de så vill kartlägga kollisionsriskerna i luftrummet direkt genom att använda observationsrapporter om trafikmängden och -tätheten i luftrummet. Dessa kartor skulle direkt visa den ursprungliga ARC för en viss del av luftrummet. Om ovan nämnda parter erbjuder en karta över kollisionsrisk (statisk eller dynamisk) ska parten som ansöker om operativt tillstånd använda denna tjänst för att fastställs ARC, och kan fortsätta fastställandet av luftrisken med strategiska riskminimeringsåtgärder.
Diagram för fastställandet av den preliminära luftrisken:
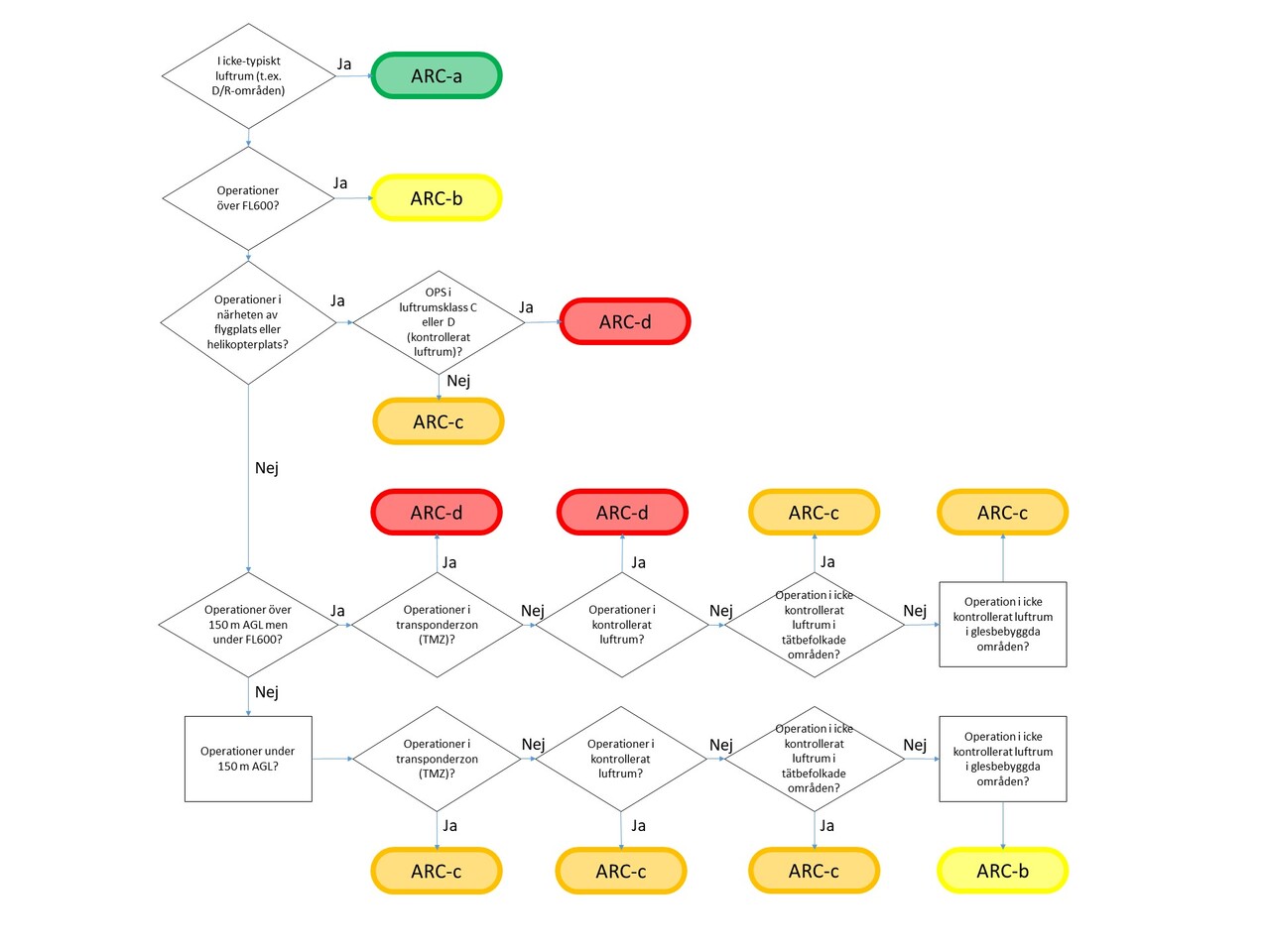
Den preliminära ARC är ett kvalitativt klassificeringsvärde för den sannolikhet att UAS stöter på ett bemannat luftfartyg i det typiska allmänna civila luftrummet. ARC är en preliminär bedömning av risken för kollision innan riskminimering. För specifika lokala luftrum kan den egentliga kollisionsrisken avvika i betydande grad, vilket kan hanteras genom att använda strategiska riskminimeringsåtgärder för att minska på ARC. Det är inte obligatoriskt att använda strategiska riskminimeringsåtgärder i SORA-processen.
Även om ARC-bedömningen är konservativ kan det finnas områden i luftrummet och/eller tider då även en konservativ ARC inte är tillräcklig. Både den behöriga myndigheten och UAS-operatören ska förstå i vilka fall verksamhetsområdet och det preliminära fastställandet av luftrisken inte motsvarar den verkliga situationen. I vissa situationer kan den behöriga myndigheten höja ARC till en högre nivå än vad som finns i tabellen över den preliminära luftrisken. Man ska höra ANSP för att kontrollera att antagandet om mängden operativ trafik är exakt.
- ARC-a har fastställts som ett luftrum där risken för kollision mellan UAV och bemannade luftfartyg ligger på en godtagbar nivå utan taktiska riskminimeringsåtgärder
- ARC-b, ARC-b och ARC-d har fastställts som luftrum där det finns en förhöjd risk att UAV och ett bemannat luftfartyg kolliderar
Drift av UAV kan eventuellt sträcka sig över flera olika luftrumsdelar. Det operativa tillståndets ansökare ska kontrollera luftrisken inom hela operationens verksamhetsområde.
5. Strategiska riskminimeringsåtgärder för luftrisken (valbar)
Liksom konstaterades tidigare är ARC en allmän kvalitativ klassificering av sannolikheten att UAS stöter på ett bemannat luftfartyg i ett visst luftrum. Det är dock möjligt att UAS verksamhetsområde har en annorlunda risk för kollision än vad som fastställs i den allmänna ARC. Om den som ansöker om operativt tillstånd anser att den allmänna ARC är för hög för luftrummet i verksamhetsområdet, ska ansökaren framföra sina strategiska riskminimeringsåtgärder för luftrummet i enlighet med artikel 11, bilaga C i Easy Access AMC (Extern länk). Om ansökaren av det operativa tillståndet är av åsikten att ARC är acceptabel inom verksamhetsområdet, skapas det av den preliminära ARC ett värde för den resterande luftrisken.
6. Taktiska riskminimeringsåtgärder för luftrisk och åtgärdernas prestanda
Taktiska riskminimeringsåtgärder för luftrisk används för att minimera den resterande luftrisken i luftrummet i fråga och behövs för att uppnå de säkerhetsmål som gäller för det ifrågavarande luftrummet. Taktiska riskminimeringsåtgärder är antingen av typen ”detektera och undvik” (see and avoid, detect and avoid, DAA), t.ex. genom VLOS, eller så kan de förutsätta ett system som erbjuder ett alternativt sätt att uppnå en tillräcklig säkerhetsnivå i luftrummet i fråga. EASA Easy Access artikel 11, bilaga D (Extern länk) har metoder för tillämpandet av taktiska riskminimeringsåtgärder.
VLOS/EVLOS-operationer
VLOS anses vara en godtagbar taktiskt riskminimeringsåtgärd på alla ARC-nivåer. Trots det uppmanas UAS-operatörer att fundera på ytterligare metoder för att öka på lägesinformationen vad beträffar bemannad lufttrafik i närheten av verksamhetsområdet.
För flygning med obemannade luftfartyg behöver man inte använda prestandakraven för de taktiska riskminimeringsåtgärderna (TMPR). Under de olika delarna av flygningen behöver VLOS-segmenten inte uppfylla TMPR-kraven men BVLOS-segmenten behöver uppfylla TMPR-kraven.
I allmänhet tillämpas VLOS-kraven även på EVLOS-operationer. Vid EVLOS-operationer finns det ytterligare krav att beakta utöver VLOS-kraven. I EVLOS-operationer får fördröjningen i kontakten mellan fjärrpiloten och den biträdande luftrumsobservatören inte överskrida 15 sekunder.
Vad beträffar VLOS-operationer ska ansökaren dokumentera åtgärderna för VLOS-undvikande och presentera vilka metoder används för att observera trafik och fastställa kriterierna för hur beslut fattas om hur trafiken som observerats ska undvikas. Om fjärrpiloten använder en observatör ska man även beskriva fraseologin som används mellan fjärrpiloten och observatören.
Vad beträffar VLOS-operationer antas det att maximidistansen som observatören kan observera bemannad flygtrafik är cirka tre kilometer. Det här är inte ett exakt värde, utan distansen beror på väderförhållanden, luftfartygets storlek, hastighet osv. Därför ska operatören kunna anpassa sig enligt omständigheterna.
Operationer som använder DAA-system - TMPR
I andra än VLOS-operationer listas i tabellen nedan TMPR-kravnivån för luftriskens resterande nivå
| Luftriskens resterande nivå | TMPR | TMPR effektivitet |
| ARC-d | Hög | Hög |
| ARC-c | Medelhög | Medelhög |
| ARC-b | Låg | Låg |
| ARC-a | Inga krav | Inga krav |
Hög TMPR (ARC-d): Luftrum där sannolikheten att påträffa bemannade luftfartyg är hög och/eller det finns få strategiska riskminimeringsåtgärder tillgängliga. Av denna orsak är den resterande risken hög och även TMPR-kraven höga. I detta luftrum kan UAV fungera i ett integrerat luftrum, och den ska följa alla förfaranden som tillämpas på luftrummet i fråga utan att försämra luftrummets tillgänglighet för bemannad luftfart. För att flyga i ARC-d-luftriskområden krävs i praktiken att man använder erkända DAA-systemstandarder, t.ex. RTCA SC-228.
Medelhög TMPR (ARC-c): Medelhög TMPR krävs när man flyger i luftrum där sannolikheten att påträffa bemannade luftfartyg är skälig och/eller mängden strategiska riskminimeringsåtgärder är på medelnivå. Medelhöga TMPR-funktioner stöder system som används av modern luftfart och som hjälper fjärrpiloter att observera bemannade luftfartyg. Funktioner för att undvika trafik är mer avancerade än på TMPR av låg nivå. Detektionskravet för medelhög TMPR är att kunna detektera 90% av trafiken inom detektionsområdet.
Låg TMPR (ARC-b): Låg TMPR krävs när man flyger i luftrum där sannolikheten att påträffa bemannade luftfartyg är liten, men inte obefintlig, och/eller där man med hjälp av strategiska riskminimeringsåtgärder kan göra den resterande risken låg. Låg TMPR kan uppnås genom att använda teknik och system som är avsedda att hjälpa fjärrpiloten att detektera annan trafik, och systemen kan fungera utgående från lägre kriterier. Till exempel åtgärder för att undvika trafik i flyghöjder under 120 meter grundar sig främst på att snabbt minska på höjden till en höjd på vilken bemannad luftfart aldrig förväntas flyga. Detektionskravet för låg TMPR är att kunna detektera 50 % av trafiken inom detektionsområdet. Tillämpbara system är till exempel:
- Webbaserade tjänster för att uppfölja flygtrafiken i realtid
- Mer förmånliga ADSB/FLARM-mottagare
- Lyssnande till radiotrafiken i luftrummet i fråga
Inga TMPR-krav (ARC-a): Ett luftrum där sannolikheten att påträffa bemannade luftfartyg uppskattas vara mycket låg, och därmed inte har några TMPR-krav. Ett sådant luftrum är ett luftrum där risken för kollision mellan UAV och ett bemannat luftfartyg är på en godtagbar nivå även utan taktisk riskminimering. Ansökaren ska bevisa att trafiken i verksamhetsområdet är så liten att inga taktiska riskminimeringsåtgärder krävs. Även operationer i luftrum som skilt reserverats för det anses vara ARC-a.
I EASA:s Easy Access artikel 11, bilaga D (Extern länk) finns närmare information om TMPR-kraven.
Beaktande av tilläggsluftrum och/eller funktionella krav
Den behöriga myndigheten eller ANSP kan kräva ändringar i ett ursprungligt godkännande eller ett senare godkännande om det uppdagas säkerhets- eller driftproblem. UAS-operatören och myndigheten bör vara medvetna om att ARC är en allmän kvalitativ klassificering av risken för kollision. Lokala omständigheter kan påverka, till och med helt tillintetgöra, SORA-luftriskanalysen, till exempel till följd av specialfall.
Verksamhet i kontrollerat luftrum, i närheten av en flyg/helikopterflygplats eller i en transponderzon/Mode C-zon (TMZ) kräver att man på förhand kontaktar och kommer överens om verksamheten med ANSP.
7. Fastställandet av nivån på den slutgiltiga resterande risken och fastställandet av funktionssäkerhet och tillförlitlighet (Specific assurance and integrity level SAIL)
SAIL-talet kombinerar riskanalyserna för mark och luft, och ger de funktionella säkerhetsmålen OSO som krävs samt deras robusthetsnivåer. SAIL representerar den nivå av förtroende man har att UAS-verksamheten förblir kontrollerad. Efter att ha fastställt den slutgiltiga markrisken GRC och den resterande luftrisken ARC får man ett SAIL-värde för verksamheten enligt verksamhetsbeskrivningen.
SAIL är inte ett siffervärde, utan anger
- Vilka OSO:n som ska följas
- En beskrivning av åtgärder som stöder uppnåendet av OSO
- Bevismaterial på att OSO har uppnåtts
SAIL fastställs enligt tabellen nedan:
| Resterande ARC | ||||
| Slutgiltig GRC | a | b | c | d |
| =<2 | I | II | IV | VI |
| 3 | II | II | IV | VI |
| 4 | III | III | IV | VI |
| 5 | IV | IV | IV | VI |
| 6 | V | V | V | VI |
| 7 | VI | VI | VI | VI |
| >7 | Operation i den certifierade kategorin |
8. Fastställande av de operativa säkerhetsmålen (OSO)
Det sista skedet i SORA-processen är att med hjälp av SAIL kontrollera hur verksamheten skyddas i form av OSO, och fastställa deras robusthet. I tabellen nedan finns robusthetsnivåerna för OSO enligt SAIL. I tabellen visas robustheten enligt bokstäverna O för icke-obligatorisk, L för lågnivå, M för medelnivå och H för hög nivå. Olika OSO:n har grupperats utgående från hotet de minimerar, och av denna orsaken finns vissa OSO:n flera gånger i tabellen.
OSO-nummer (Bilaga E) | SAIL | ||||||
| Technical issue with the UAS | I | II | III | IV | V | VI | |
| OSO#1 | Ensure the UAS operator is competent and/or proven | O | L | M | H | H | H |
| OSO#2 | UAS manufactured by competent and/or proven entity | O | O | L | M | H | H |
| OSO#3 | UAS maintained by competent and/or proven entity | L | L | M | M | H | H |
| OSO#4 | UAS developed to authority recognised design standards | O | O | L | L | M | H |
| OSO#5 | UAS is designed considering system safety and reliability | O | O | L | M | H | H |
| OSO#6 | C3 link performance is appropriate for the operation | O | L | L | M | H | H |
| OSO#7 | Inspection of the UAS (product inspection) to ensure consistency with the ConOps | L | L | M | M | H | H |
| OSO#8 | Operational procedures are defined, validated and adhered to | L | M | H | H | H | H |
| OSO#9 | Remote crew trained and current and able to control the abnormal situation | L | L | M | M | H | H |
| OSO#10 | Safe recovery from a technical issue | L | L | M | M | H | H |
Deterioration of external systems supporting UAS operations | |||||||
| OSO#11 | Procedures are in-place to handle the deterioration of external systems supporting UAS operations | L | M | H | H | H | H |
| OSO#12 | The UAS is designed to manage the deterioration of external systems supporting UAS operations | L | L | M | M | H | H |
| OSO#13 | External services supporting UAS operations are adequate for the operation | L | L | M | H | H | H |
| Human error | |||||||
| OSO#14 | Operational procedures are defined, validated and adhered to | L | M | H | H | H | H |
| OSO#15 | Remote crew trained and current and able to control the abnormal situation | L | L | M | M | H | H |
| OSO#16 | Multi-crew coordination | L | L | M | M | H | H |
| OSO#17 | Remote crew is fit to operate | L | L | M | M | H | H |
| OSO#18 | Automatic protection of the flight envelope from human error | O | O | L | M | H | H |
| OSO#19 | Safe recovery from human error | O | O | L | M | M | H |
| OSO#20 | A human factors evaluation has been performed and the human machine interface (HMI) found appropriate for the mission | O | L | L | M | M | H |
| Adverse operating conditions | |||||||
| OSO#21 | Operational procedures are defined, validated and adhered to | L | M | H | H | H | H |
| OSO#22 | The remote crew is trained to identify critical environmental conditions and to avoid them | L | L | M | M | M | H |
| OSO#23 | Environmental conditions for safe operations are defined, measurable and adhered to | L | L | M | M | H | H |
| OSO#24 | UAS is designed and qualified for adverse environmental conditions | O | O | M | H | H | H |
9. Beaktande av området invid verksamhetsområdet och luftrummet
I denna punkt är avsikten att hantera risker som orsakas av förlust av kontroll som leder till att UAV finner sig i ett område eller luftrum som gränsar till verksamhetsområdet. Dessa områden kan variera enligt flygskedet.
Säkerhetskraven för skyddet är:
Inget sannolikt fel i UAS-enheten eller ett fel i systemet som styr verksamheten får leda till att UAS-driften sker utanför verksamhetsområdet.
- Överenstämmelse med kravet ska påvisas med en planerings- och tillverkningsutvärdering, som ska innehålla minst
- Planerings- och tillverkningsegenskaper (självständighet, separation och redundans, independence, separation, redundancy)
- Alla skilda riskfaktorer enligt verksamhetsbeskrivningen (t.ex. hagel, is, snö, elektromagnetiska störningar osv.)
Effektiverade systemkrav för att hålla sig inom verksamhetsområdet består av följande säkerhetskrav, och berör operationer som genomförs i nedanstående omständigheter:
- I området invid verksamhetsområdet finns en folksamling, och UAS är inte certifierad att flyga ovanför en folksamling, eller
- Luftrummets luftrisk i området invid verksamhetsområdet är på ARC-d-nivå, om inte den resterande risken för operationen redan är ARC-d, eller
- Verksamhetsområdet ligger inom ett tätbefolkat område där man använt M1-riskminimering för att minimera markrisken, eller
- Verksamheten sker i ett kontrollerat markområde
UAS har designats enligt standarder som den behöriga myndigheten anser vara tillräckliga och/eller överensstämmer med kraven som godkänts av myndigheten i fråga så att:
- Sannolikheten att UAS avlägsnar sig från verksamhetsområdet är mindre än 10^-4/flygtimme; och
- Inget enskilt fel i UAS får leda till att den orsakar markrisk utanför bufferten
- Överenstämmelse med dessa krav ska påvisas med analys- och/eller testuppgifter och bevismaterial som stöder dessa.
Programvaran och sådana elektroniska apparaterna i luftfartyget som i fall av designfel direkt kan leda till att de förorsakar markrisk utanför buffertzonen måste utvecklas enligt luftfartsstandarder eller -metoder på ett sätt som den behöriga myndigheten godkänner.
Eftersom det inte är möjligt att förutspå alla möjliga situationer ska UAS-operatören, den behöriga myndigheten och ANSP använda sin egen bedömning för att fastställa luftrummet och markområdet som avgränsar verksamhetsområdet.
10. Omfattande säkerhetsbedömning
SORA-processen erbjuder ansökare av operativt tillstånd, den behöriga myndigheten och flygkontrolltjänstens leverantörer en metod som innehåller en serie riskminimeringar och säkerhetsmål som ska tas i beaktande för att kunna garantera en tillräckligt hög förtroendenivå för verksamhetens säkerhet. Dessa är:
- Riskminimeringsåtgärder för den preliminära landrisken GRC
- Strategiska riskminimeringsåtgärder för den preliminära luftrisken ARC
- Taktiska riskminimeringsåtgärder för den resterande risken ARC
- Beaktande av luft- och markområden som avgränsar verksamhetsområdet
- Operativa säkerhetsmål OSO
Riskminimeringen som SORA-processen förutsätter och tillräcklig motivering av målen ger tillräckligt förtroende att den avsedda operationen kan utföras säkert.
UAS-operatören ska beakta alla tilläggskrav som inte hör till SORA-processen (till exempel säkerhetsfrågor, security, integritet, miljöskydd osv.) och känna till de relevanta intressentgrupperna, till exempel miljöskyddsmyndigheten, nationella säkerhetsorgan osv. Åtgärderna i SORA-processen svarar troligen på dessa tilläggsbehov, men de är inte alltid nödvändigtvis tillräckliga.
UAS-operatören ska kontrollera att SORA-riskbedömningen och de verkliga operativa omständigheterna (under operationen) är enhetliga och vid behov avbryta operationen.